 |
|

このページでは2004年1月に火星のメリディアニ平原に着陸したマーズローバーオポチュニティ(火星探査ローバーB)の火星での活動をご紹介しています。

July 21, 2017
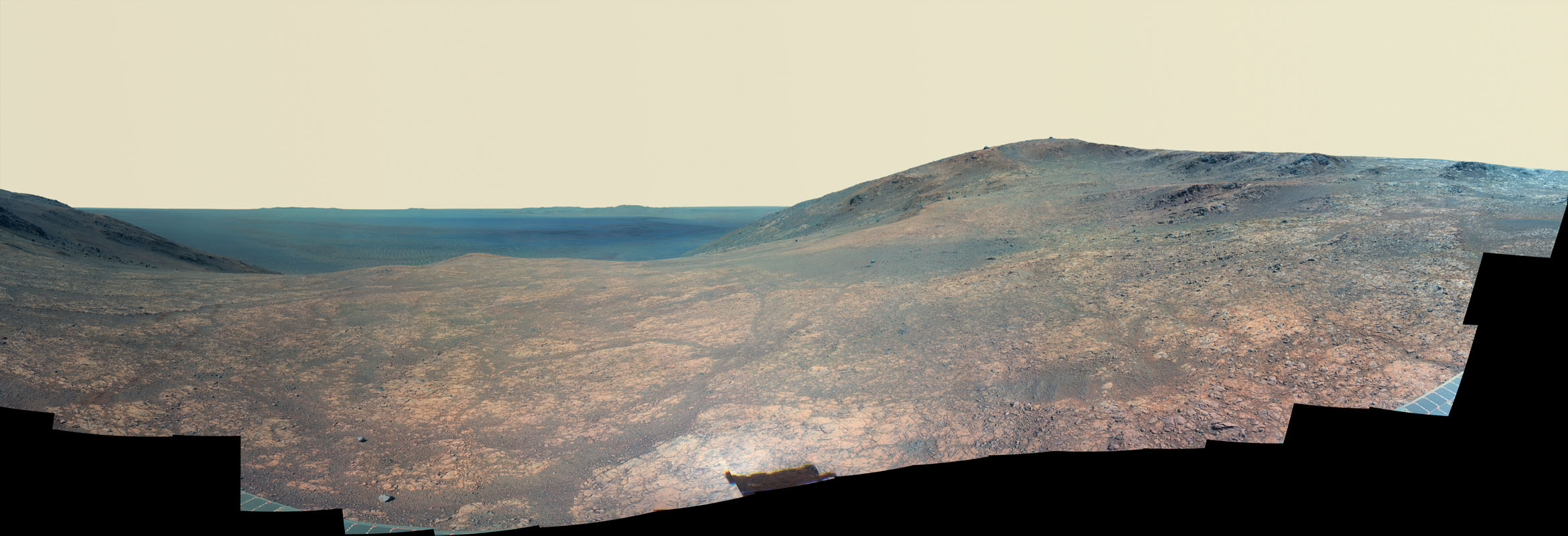
 NASAの火星探査ローバー・オポチュニティは、この大きなクレータの縁の内部の傾斜を下る、流れで刻まれた谷の上端に入る前に、このパノラマの眺望を記録した。この場面は、クレータの縁の頂の広い凹み(notch)を含み、それは、水、氷、風のいづれかが縁の上をクレータの中に流れた水はけ口だったのかもしれない。凹みのエリアに見られる轍は、ローバーがルート設計に使う谷の下のイメージをとり地面を調査したときに、オポチュニティによって残された。オポチュニティのパノラマカメラ(Pancam)は、2週間のドライブ休止の間の2017年6月に、この場面の構成要素イメージをとった。この場面の二つの端は、南北に拡がるエンデバー・クレータの西の縁を示し、この場面の中央はクレータの外側の大地を示している。
NASAの火星探査ローバー・オポチュニティは、この大きなクレータの縁の内部の傾斜を下る、流れで刻まれた谷の上端に入る前に、このパノラマの眺望を記録した。この場面は、クレータの縁の頂の広い凹み(notch)を含み、それは、水、氷、風のいづれかが縁の上をクレータの中に流れた水はけ口だったのかもしれない。凹みのエリアに見られる轍は、ローバーがルート設計に使う谷の下のイメージをとり地面を調査したときに、オポチュニティによって残された。オポチュニティのパノラマカメラ(Pancam)は、2週間のドライブ休止の間の2017年6月に、この場面の構成要素イメージをとった。この場面の二つの端は、南北に拡がるエンデバー・クレータの西の縁を示し、この場面の中央はクレータの外側の大地を示している。July 20 2017


June 16, 2017

NASAの火星探査ローバー・オポチュニティは、その現在の2年間の拡張ミッションの主な目的地、広大なクレータの縁の内部の傾斜で刻まれた古代の流体で刻まれた谷に着いた。ローバーが5月初めに「忍耐の谷(Perseverance Valley)」の上端に接近したとき、そのカメラからのイメージは、火星の軌道からとられたイメージに見るより大きな解像度で、このエリアの部分を示し始めた。図1 --- 「忍耐の谷」は、谷に下るドライブの準備として2017年5月に早くにこの目的地に到着したNASAの長命の火星探査ローバーオポチュニティのナビゲーションカメラ(Navcam)の、この視点から見られるクレータの縁の下り坂の向こう側に横たわっている。

図2 --- 右の図は、NASAの火星探査ローバーオポチュニティが、2017年春に、エンデバークレータの西の縁の「忍耐の谷」に最終的に接近したルートを示している。何10億年も前にエンデバークレータの縁に忍耐の谷(Perseverance Valley)を刻んだプロセスはまだ確認されていない。その可能性としては、少量の水が泥と巨礫の混ざった混乱を促進した水の流れまたは破片の流れであったかもしれず、あるいは、風の浸食のようなより乾燥したプロセスであったかもしれない。谷の上端は、クレータの縁の頂の広い窪みである。ローバー・チームのこのエリアを調査する計画は、縁の深みにおける二つの広く切り離された点から谷のイメージのセットをとることで始まった。この長いベースラインのステレオ画像は、この地勢の特別に詳細な3次元分析のための情報を提供するだろう。この谷は、概ね二つのフットボールフィールドの距離で約15~17度の傾斜で、縁の頂上のラインからクレータの中に下って広がっている。

図3 --- この2017年4月21日のローバーのパノラマカメラからの視界に、エンデバークレータの縁の「トリビュレーション岬(Cape Tribulation)」のセグメントを降下し出発する、NASAのマーズローバーオポチュニティからの轍が見える。ローバーは、「忍耐の谷」への南への旅の間に、北に向かって振り返った。以下長文のため省略します。
May 15, 2017
 「ガスコネイド(Gasconade)」と呼ばれる岩のこの比較的明るい露出は、ローバーが火星のエンデバークレータの西の端の「スピリッツマウンド(Spirit Mound)」に留まっている間に、NASAの火星探査ローバーオポチュニティによって調査された。この合成は、火星日 4,512 日の2016年10月2日に、オポチュニティのロボットアームの顕微鏡画像装置によってとられた四つのフレームを結合している。ターゲットに見える素材の違いを強調するために、オポチュニティのパノラマカメラからの拡張されたカラー情報が加えられた。この視界は幅約5センチメートルのエリアをカバーしている。オポチュニティの調査では、クレータを掘ったインパクトの出来事の落下物からつくられたのかもしれない明るいマトリックスの中の暗い岩の角ばった風によって彫られた露岩、ガスコネイドを発見した。スピリッツマウンドの この場所 は、エンデバークレータの西の縁で、オポチュニティが以前に訪ねたどのサイトよりも深いものである。
「ガスコネイド(Gasconade)」と呼ばれる岩のこの比較的明るい露出は、ローバーが火星のエンデバークレータの西の端の「スピリッツマウンド(Spirit Mound)」に留まっている間に、NASAの火星探査ローバーオポチュニティによって調査された。この合成は、火星日 4,512 日の2016年10月2日に、オポチュニティのロボットアームの顕微鏡画像装置によってとられた四つのフレームを結合している。ターゲットに見える素材の違いを強調するために、オポチュニティのパノラマカメラからの拡張されたカラー情報が加えられた。この視界は幅約5センチメートルのエリアをカバーしている。オポチュニティの調査では、クレータを掘ったインパクトの出来事の落下物からつくられたのかもしれない明るいマトリックスの中の暗い岩の角ばった風によって彫られた露岩、ガスコネイドを発見した。スピリッツマウンドの この場所 は、エンデバークレータの西の縁で、オポチュニティが以前に訪ねたどのサイトよりも深いものである。
Dec 09, 2016
 「プライベート・ジョセフ・フィールド(Private Joseph Field)」と呼ばれるターゲットの、この2016年5月29日のイメージは、NASAの火星探査ローバー・オポチュニティの顕微鏡画像装置からのイメージを、ローバーのパノラマカメラからの拡張されたカラー情報と結合している。このターゲットは火星のエンデバー・クレータの西の縁にある。
「プライベート・ジョセフ・フィールド(Private Joseph Field)」と呼ばれるターゲットの、この2016年5月29日のイメージは、NASAの火星探査ローバー・オポチュニティの顕微鏡画像装置からのイメージを、ローバーのパノラマカメラからの拡張されたカラー情報と結合している。このターゲットは火星のエンデバー・クレータの西の縁にある。
Dec 09, 2016
 NASAの火星探査ローバーオポチュニティからのこの場面は、エンデバークレータの西の縁の「マラソン谷」の南の壁の一部を構成する「ウォートンの隆起(Wharton Ridge)」を示している。エンデバークレータのフロアと遠い背景のクレータの遠い壁とともに、ウォートン隆起の完全な広がりが見える。この場面の右端近くは、2016年9月にオポチュニティがマラソン谷から「ビタールート谷」へ向かって横断した、「ルイスとクラークギャップ(Lewis and Clark Gap)」である。この光景の構成要素イメージは、ローバーがマラソン谷を出発する前の、火星日 4,480 日(2016年8月30日)に、そのパノラマカメラ(Pancom)でとられた。オポチュニティの科学チームは、この隆起の名前を、火星の居住適性に結びつく科学的な問題を研究した、特に南極大陸の地球のアナログ環境を使うパイオニアであった宇宙生物学者、ロバート A. ウォートン(Robert A. Wharton:1951~2012年)の記憶を称えるために選んだ。この視界は左の東北東から右の南東まで広がっている。これは、 753ナノメートル(近赤外線)、 535 ナノメートル(緑)、 432 ナノメートル(紫)の、パノラマカメラの三つのカラーフィルタを通してとられた露出を結合している。これはほぼ真の色で示されている。
NASAの火星探査ローバーオポチュニティからのこの場面は、エンデバークレータの西の縁の「マラソン谷」の南の壁の一部を構成する「ウォートンの隆起(Wharton Ridge)」を示している。エンデバークレータのフロアと遠い背景のクレータの遠い壁とともに、ウォートン隆起の完全な広がりが見える。この場面の右端近くは、2016年9月にオポチュニティがマラソン谷から「ビタールート谷」へ向かって横断した、「ルイスとクラークギャップ(Lewis and Clark Gap)」である。この光景の構成要素イメージは、ローバーがマラソン谷を出発する前の、火星日 4,480 日(2016年8月30日)に、そのパノラマカメラ(Pancom)でとられた。オポチュニティの科学チームは、この隆起の名前を、火星の居住適性に結びつく科学的な問題を研究した、特に南極大陸の地球のアナログ環境を使うパイオニアであった宇宙生物学者、ロバート A. ウォートン(Robert A. Wharton:1951~2012年)の記憶を称えるために選んだ。この視界は左の東北東から右の南東まで広がっている。これは、 753ナノメートル(近赤外線)、 535 ナノメートル(緑)、 432 ナノメートル(紫)の、パノラマカメラの三つのカラーフィルタを通してとられた露出を結合している。これはほぼ真の色で示されている。
 同、疑似カラー(組成の際を明確に示すための表現)。
同、疑似カラー(組成の際を明確に示すための表現)。
Oct 08, 2016
 NASAの火星探査ローバーオポチュニティのパノラマカメラ(Pancam)からのこの光景は、エンデバークレータのフロアを見渡す「スピリッツマウンド(Spirit Mound)」を示している。このマウンドは、クレータの西の縁の「ビタールート(Bitterroot)谷」の東端近くにあり、東の方向に向かっている。スケールの参考として、中央下の2個の岩はそれぞれ差渡し約20センチメートルである。マウンドの頂上ラインのイメージは幅約 8.5 メートルのエリアをカバーしている。この合成のための構成要素イメージは火星日 4,501 日(2016年9月21日)にとられた。各露出は、 753 ナノメートル(近赤外線)、 535 ナノメートル(緑)、 432 ナノメートル(紫)の、パノラマカメラの三つのカラーフィルタを通してとられた。この光景はほぼ真の色で示されている。ローバーの科学チームがこの地形のために選んだ非公式の名前はサウスダコタのスピリッツマウンドを指している。チームは、ルイスとクラーク遠征(Lewis and Clark Expedition)によって訪問された、その遠征がモンタナを訪ねた谷にちなんで、非公式の名前として火星のビタールート谷の名前を使っている。
NASAの火星探査ローバーオポチュニティのパノラマカメラ(Pancam)からのこの光景は、エンデバークレータのフロアを見渡す「スピリッツマウンド(Spirit Mound)」を示している。このマウンドは、クレータの西の縁の「ビタールート(Bitterroot)谷」の東端近くにあり、東の方向に向かっている。スケールの参考として、中央下の2個の岩はそれぞれ差渡し約20センチメートルである。マウンドの頂上ラインのイメージは幅約 8.5 メートルのエリアをカバーしている。この合成のための構成要素イメージは火星日 4,501 日(2016年9月21日)にとられた。各露出は、 753 ナノメートル(近赤外線)、 535 ナノメートル(緑)、 432 ナノメートル(紫)の、パノラマカメラの三つのカラーフィルタを通してとられた。この光景はほぼ真の色で示されている。ローバーの科学チームがこの地形のために選んだ非公式の名前はサウスダコタのスピリッツマウンドを指している。チームは、ルイスとクラーク遠征(Lewis and Clark Expedition)によって訪問された、その遠征がモンタナを訪ねた谷にちなんで、非公式の名前として火星のビタールート谷の名前を使っている。
 同(疑似カラー:組成の違いを表す)
同(疑似カラー:組成の違いを表す)
 同(ステレオ)
同(ステレオ)
Oct 08, 2016
 このマップは、2015年と2016年にNASAの火星探査ローバーオポチュニティが集中的に調査した、またミッションの南の目的地である流体が刻んだ溝、「マラソン谷」エリアを含むエンデバークレータの西の縁の一部を示している。このマップでカバーされたエリアの幅は約800メートルである。北は上である。オポチュニティは2015年1月にマップのエリアの北の端に入り、同年7月にマラソン谷に入った。拡大しないと見えないかも知れないが、マップの金色の線はローバーのルートを示している。キュリオシティは、「ビタールート(Bitterroot)谷」の中で、「ルイスとクラークギャップ(Lewis and Clark Gap)」を通して南に向かってドライブするために、2016年9月にマラソン谷を出発した。マップの南端近くの溝は、おそらく、水を含んだ破片の流れまたは水の流れによって大部分が古い昔にエンデバーの縁に刻まれた。その流れについて一層学ぶためにこの溝の中をドライブすることは、2018年9月を通しての、オポチュニティの2年間の拡張ミッションのゴールの一つである。ここに示されているローバーの横断は、NASAの火星偵察軌道船の HiRISE カメラからのイメージである。
このマップは、2015年と2016年にNASAの火星探査ローバーオポチュニティが集中的に調査した、またミッションの南の目的地である流体が刻んだ溝、「マラソン谷」エリアを含むエンデバークレータの西の縁の一部を示している。このマップでカバーされたエリアの幅は約800メートルである。北は上である。オポチュニティは2015年1月にマップのエリアの北の端に入り、同年7月にマラソン谷に入った。拡大しないと見えないかも知れないが、マップの金色の線はローバーのルートを示している。キュリオシティは、「ビタールート(Bitterroot)谷」の中で、「ルイスとクラークギャップ(Lewis and Clark Gap)」を通して南に向かってドライブするために、2016年9月にマラソン谷を出発した。マップの南端近くの溝は、おそらく、水を含んだ破片の流れまたは水の流れによって大部分が古い昔にエンデバーの縁に刻まれた。その流れについて一層学ぶためにこの溝の中をドライブすることは、2018年9月を通しての、オポチュニティの2年間の拡張ミッションのゴールの一つである。ここに示されているローバーの横断は、NASAの火星偵察軌道船の HiRISE カメラからのイメージである。
Oct 08, 2016

June 17, 2016
June 17, 2016

June 15, 2016
 NASAの火星探査ローバー・オポチュニティは、丘の高所のとまり木から、下の谷で渦巻く火星のダストデビルのこのイメージを記録した。この視界は、「マラソン谷(Marathon Valley)」の南の端の一部、「クヌーセンの丘(Knudsen Ridge)」の北に面した斜面のローバーの轍を振り返っている。オポチュニティは、火星日 4,332 日(2016年3月31日)に、そのナビゲーション・カメラ(Navcam)を使ってこのイメージをとった。ダストデビルは、グセフ・クレータの対のローバースピリッツとっては一般的であったが、オポチュニティには稀である。地球では、ダストデビルは、熱い空気の上昇と回転によって生じる。その柱が十分に速く回転するとき、ダストの小さい粒を地面から拾い上げ渦となって見える。オポチュニティの傾きは、クヌーセンの丘の上に向かってドライブする間に、これまでに全てのローバーが経験したことのない32度に達した。
NASAの火星探査ローバー・オポチュニティは、丘の高所のとまり木から、下の谷で渦巻く火星のダストデビルのこのイメージを記録した。この視界は、「マラソン谷(Marathon Valley)」の南の端の一部、「クヌーセンの丘(Knudsen Ridge)」の北に面した斜面のローバーの轍を振り返っている。オポチュニティは、火星日 4,332 日(2016年3月31日)に、そのナビゲーション・カメラ(Navcam)を使ってこのイメージをとった。ダストデビルは、グセフ・クレータの対のローバースピリッツとっては一般的であったが、オポチュニティには稀である。地球では、ダストデビルは、熱い空気の上昇と回転によって生じる。その柱が十分に速く回転するとき、ダストの小さい粒を地面から拾い上げ渦となって見える。オポチュニティの傾きは、クヌーセンの丘の上に向かってドライブする間に、これまでに全てのローバーが経験したことのない32度に達した。March 31, 2016
 NASAのシニア火星ローバーオポチュニティは、ここ数週間、赤い惑星に関する環境の歴史の手掛かりを調査するために、ダイヤモンドの歯を持つ岩研磨機その他のツールを使って、ミッション7回目の火星の冬の、最も低い太陽エネルギーの日を通して働いてきた。最近の、火星の1月2日の南半球の冬至前後の週に、火星の環境は、オポチュニティの太陽電池板からダストを取り除く風を提供した。オポチュニティは、ここ数年の冬よりソーラーアレイが非常にクリーンだったので、この冬は非常に活動的であった。冬至が過ぎ、2016年のほとんどはオポチュニティが利用できる日光の量が増加し続けるだろう。
NASAのシニア火星ローバーオポチュニティは、ここ数週間、赤い惑星に関する環境の歴史の手掛かりを調査するために、ダイヤモンドの歯を持つ岩研磨機その他のツールを使って、ミッション7回目の火星の冬の、最も低い太陽エネルギーの日を通して働いてきた。最近の、火星の1月2日の南半球の冬至前後の週に、火星の環境は、オポチュニティの太陽電池板からダストを取り除く風を提供した。オポチュニティは、ここ数年の冬よりソーラーアレイが非常にクリーンだったので、この冬は非常に活動的であった。冬至が過ぎ、2016年のほとんどはオポチュニティが利用できる日光の量が増加し続けるだろう。Jan 26, 2016



Sept 26, 2015
Sept 26, 2015
 TOP
TOP
 PREV
PREV