 |  |
| |

このコーナーでは2009年6月18日に打上げられた月偵察軌道船(LRO:Lunar Reconnaissance Orbiter)および月クレータ観測探知衛星(LCROSS:エルクロス:Lunar Crater Observation and Sensing Satellite)の記事を掲載しています。月偵察軌道船のミッション、測定機器などはトップのページを参照してください。なお記事を読み易くするために地名をカナ読みに置き換えています。“「読み」が正しくない”ことも想定されますのでご承知置きください。なお、はっきりしないものには原名を添えてあります。
 |
| NASA/GSFC/Arizona 州立大学 |
|---|
 |
| Credit: NASA |
|---|
 |
 |
Mar 23, 2010
 |
| 地平線上8度で18メートル長の太陽の影を投げるサーベイヤ6号 |
| Credit: NASA/GSFC/Arizona 州立大学 |
|---|
| |||
|
 |
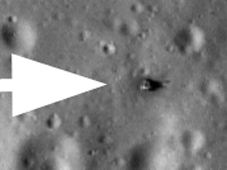
| サーベイヤ1号は二つの非常に異なる照明の下で「月偵察軌道船カメラ」によって描かれた。背景のイメージは地平線の上太陽が67度で獲得された。サーベイヤは矢印で示され上の差し込みに拡大されている。下の差し込みは地平線からの太陽が14度で描かれた同じサーベイヤを示す。 |
| Credit: NASA/GSFC/Arizona 州立大学 |
|---|
Mar 23, 2010
 |
| 直径10メートルのクレータに座るサーベイヤ5号:幅約960メートル。 |
| NASA/GSFC/Arizona 州立大学 |
|---|
 |
| サーベイヤ5号の拡大イメージ |
| NASA/GSFC/Arizona 州立大学 |
|---|
Mar 22, 2010
 |
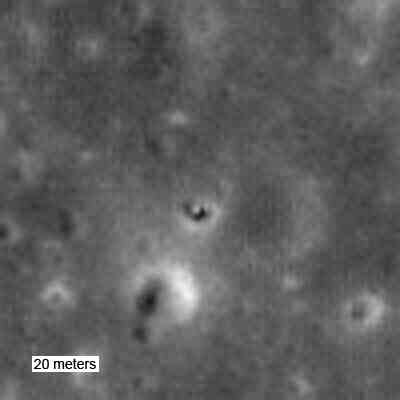
| 1970年11月にルノホート1号月面車を届けたソ連のロボット着陸船ルナ17号は雨の海に依然として座っている。 |
| NASA/GSFC/Arizona 州立大学 |
|---|
 |
| ルナ17号着陸船の拡大、ルノホート1号のランプのスタートおよび着陸船を囲む軌跡に注意! |
 |
| ルノホートローバーは長さ約 2.3 メートル高さ 1.5 メートルであった。 |
 |
| 最終の駐車場所のルノホート1号月面車 |
 |
| ルノホート2号ローバー、その軌跡が南に向いているのに注意! その拡大はローバーの形を示すために特に広げられている。 |
 |
| Ruslan Kasmin の好意によるイメージ:最後のルノホート2号パノラマの断片。 |
Mar 18, 2010
 |
| 1972年2月21日にルナ20号は豊かの海と危難の海の間のでこぼこの高原にソフトランディングした。翌日、サンプル回収カプセルは55グラムの月の土を運んで発射された。ルナ20号の降下部分がまだ「月偵察軌道船カメラ」狭角カメライメージに明瞭に見える月に静かに座っている。 |
| NASA/GSFC/Arizona 州立大学 |
|---|
 |
| ルナ16号サンプルリターン宇宙船。 |
 |
| ルナ20号降下ステージの拡大。サンプリングアームの影に注意。 |
 |
| 直径60メートルのクレータの端に座るルナ24号 |
| NASA/GSFC/Arizona 州立大学 |
|---|
Mar 16, 2010
 |
| NASA/GSFC |
|---|
Mar 12, 2010
 TOP
TOP
 PREV
PREV
 NEXT
NEXT

